Un sensor en sentido general es un dispositivo que convierte una cantidad física en otra, conveniente para su procesamiento, transmisión o posterior conversión. Por regla general, la primera cantidad es física, no susceptible de medición directa (temperatura, velocidad, desplazamiento, etc.), y la segunda es una señal eléctrica u óptica. Los sensores ocupan un nicho en el campo de los instrumentos de medición, cuyo elemento principal es un inductor.
Contenido
Cómo funciona el sensor de inductancia y cómo funciona
Según el principio de funcionamiento, los sensores inductivos son activos, es decir, requieren un generador externo para funcionar. Proporciona una señal con una frecuencia y amplitud dadas al inductor.
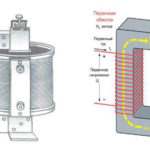
La corriente que pasa a través de las vueltas de la bobina crea un campo magnético. Si un objeto conductor entra en el campo magnético, los parámetros de la bobina cambian.Solo queda arreglar este cambio.
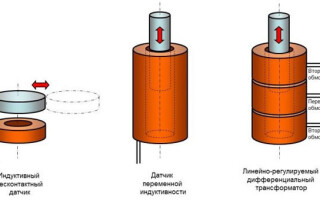
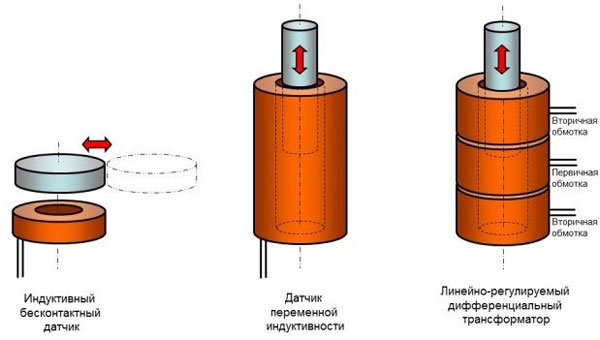
Los sensores simples sin contacto reaccionan a la aparición de objetos metálicos en la zona cercana del devanado. Esto cambia la impedancia de la bobina, este cambio debe convertirse en una señal eléctrica, amplificar y (o) fijar el paso del umbral utilizando un circuito de comparación.
Sensores de otro tipo responden a cambios en la posición longitudinal del objeto que sirve como núcleo de la bobina. Cuando cambia la posición del objeto, se mueve dentro o fuera de la bobina, cambiando así su inductancia. Este cambio puede convertirse en una señal eléctrica y medirse. Otra versión de dicho sensor es cuando un objeto se acerca a la bobina desde el exterior. Esto hace que la inductancia disminuya debido al efecto suelo.
Otra versión del sensor de desplazamiento inductivo es un transformador diferencial ajustable linealmente (LVDT). Es una bobina compuesta, hecha en el siguiente orden:
- devanado secundario 1;
- devanado primario;
- devanado secundario 2.
La señal del generador se alimenta al devanado primario. El campo magnético creado por la bobina central induce un EMF en cada uno de los secundarios (principio del transformador). El núcleo, cuando se mueve, cambia la conexión mutua entre las bobinas, cambiando la fuerza electromotriz en cada uno de los devanados. Este cambio puede ser fijado por el circuito de medición. Dado que la longitud del núcleo es menor que la longitud total de la bobina compuesta, la posición del objeto puede determinarse sin ambigüedades mediante la relación EMF en los devanados secundarios.
Con el mismo principio, un cambio en el acoplamiento inductivo entre los devanados, se construye un sensor de giro.Consta de dos bobinas coaxiales. La señal se aplica a uno de los devanados, el EMF en el segundo depende del ángulo de rotación mutuo.
Por el principio de funcionamiento, es obvio que los sensores inductivos, independientemente del diseño, son sin contacto. Trabajan a distancia y no requieren contacto directo con el objeto controlado.
Ventajas y desventajas de los sensores inductivos
Las ventajas de los sensores de tipo inductivo incluyen principalmente:
- fiabilidad del diseño;
- falta de conexiones de contacto;
- alta potencia de salida, que reduce la influencia del ruido y simplifica el circuito de control;
- alta sensibilidad;
- la capacidad de trabajar a partir de fuentes de tensión alterna de frecuencia industrial.
La principal desventaja de los sensores de tipo inductivo es su tamaño, peso y complejidad de fabricación. Para enrollar bobinas con los parámetros dados, se requiere equipo especial. Además, la necesidad de mantener con precisión la amplitud de la señal del oscilador maestro se considera negativa. Cuando cambia, el área de sensibilidad también cambia. Dado que los sensores funcionan solo con corriente alterna, mantener la amplitud se convierte en un cierto problema técnico. Directamente (o a través de un transformador reductor) no será posible conectar el sensor a una red doméstica o industrial; en ella, las fluctuaciones de voltaje en amplitud o frecuencia pueden llegar incluso al 10% en modo normal, lo que hace que la precisión de la medición sea inaceptable. .
Además, la precisión de la medición puede verse afectada por:
- campos magnéticos de terceros (el blindaje del sensor es imposible según el principio de su funcionamiento);
- captadores de campos electromagnéticos de terceros en cables de suministro y medición;
- errores de fabricación;
- error característico del sensor;
- contragolpes o deformaciones en el sitio de instalación del sensor que no afectan el rendimiento general;
- dependencia de la precisión de la temperatura (los parámetros del cable del devanado cambian, incluida su resistencia).
La incapacidad de los sensores de inductancia para responder a la aparición de objetos dieléctricos en su campo magnético puede atribuirse tanto a ventajas como a desventajas. Por un lado, esto limita el alcance de su aplicación. Por otro lado, lo hace insensible a la presencia de suciedad, grasa, arena, etc. en los objetos monitoreados.
El conocimiento de las carencias y posibles limitaciones en el funcionamiento de los sensores inductivos permite un aprovechamiento racional de sus ventajas.
Alcance de los sensores inductivos
Los sensores de proximidad inductivos se utilizan a menudo como interruptores de límite. Tales dispositivos se han generalizado:
- en sistemas de seguridad, como sensores para apertura no autorizada de ventanas y puertas;
- en sistemas de telemecánica, como sensores de la posición final de unidades y mecanismos;
- en la vida cotidiana en los esquemas para indicar la posición cerrada de puertas, persianas;
- para contar objetos (por ejemplo, moviéndose a lo largo de la cinta transportadora);
- para determinar la velocidad de rotación de los engranajes (cada diente, al pasar por el sensor, crea un impulso);
- en otras situaciones.

Los codificadores de ángulo se pueden utilizar para determinar los ángulos de rotación de ejes, engranajes y otros componentes giratorios, así como los codificadores absolutos. Además, dichos dispositivos se pueden usar en máquinas herramienta y dispositivos robóticos junto con sensores de posición lineal. Donde necesita saber exactamente la posición de los nodos de los mecanismos.
Ejemplos prácticos de implementación de sensores inductivos
En la práctica, los diseños de sensores inductivos se pueden implementar de diferentes formas. La ejecución e inclusión más simple es para un sensor único de dos hilos, que monitorea la presencia de objetos metálicos en su zona de sensibilidad. Dichos dispositivos a menudo se fabrican sobre la base de un núcleo en forma de E, pero este no es un punto fundamental. Tal implementación es más fácil de fabricar.
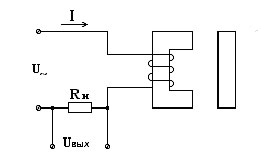
Cuando la resistencia de la bobina cambia, la corriente en el circuito y la caída de voltaje en la carga cambian. Estos cambios se pueden confirmar. El problema es que la resistencia de carga se vuelve crítica. Si es demasiado grande, los cambios en la corriente cuando aparezca un objeto metálico serán relativamente pequeños. Esto reduce la sensibilidad y la inmunidad al ruido del sistema. Si es pequeño, entonces la corriente en el circuito será grande, se requerirá un sensor más resistente.
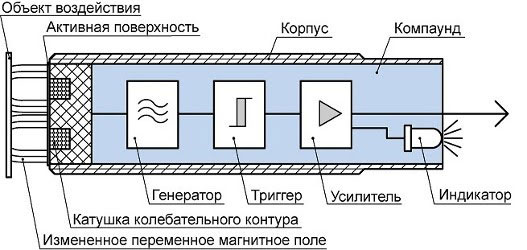
Por lo tanto, existen diseños en los que el circuito de medición está integrado en la carcasa del sensor. El generador genera pulsos que alimentan el inductor. Cuando se alcanza cierto nivel, el gatillo se dispara, pasando del estado 0 al 1 o viceversa. El amplificador de búfer amplifica la señal en términos de potencia y (o) voltaje, enciende (apaga) el LED y envía una señal discreta al circuito externo.
La señal de salida se puede formar:
- por electromagnético o relé de estado sólido – cero o un nivel de tensión;
- "contacto seco" relé electromagnético;
- coleccionista abierto transistor (estructuras n-p-n o p-n-p).
En este caso, se requieren tres cables para conectar el sensor:
- alimento;
- cable común (0 voltios);
- cable de señal
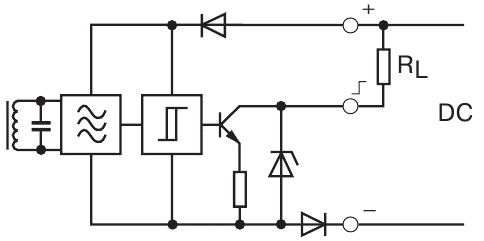
Dichos sensores también pueden ser alimentados por voltaje de CC. Los pulsos a la inductancia se forman mediante un generador interno.
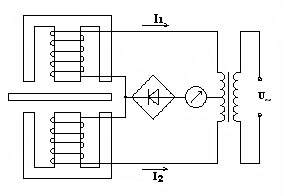
Los codificadores diferenciales se utilizan para el control de posición. Si el objeto controlado es simétrico con respecto a ambas bobinas, la corriente a través de ellas es la misma. Cuando cualquier devanado se desplaza hacia el campo, se produce un desequilibrio, la corriente total deja de ser igual a cero, lo que se puede registrar mediante un indicador con una flecha en el medio de la escala. El indicador se puede utilizar para determinar tanto la magnitud del cambio como su dirección. En lugar de un dispositivo puntero, puede utilizar un esquema de control que, al recibir información sobre un cambio de posición, emitirá una señal, tomará medidas para alinear el objeto, realizará ajustes en el proceso tecnológico, etc.

Los sensores hechos de acuerdo con el principio de los transformadores diferenciales ajustables linealmente se producen en forma de estructuras completas, que son un marco con devanados primario y secundario y una varilla que se mueve en el interior (puede tener un resorte). Los cables se sacan para enviar una señal desde el generador y eliminar el EMF de los devanados secundarios. Un objeto controlado se puede unir mecánicamente a la barra. También puede estar hecho de un dieléctrico: solo la posición del vástago es importante para la medición.
A pesar de ciertas deficiencias inherentes, el sensor inductivo cierra muchas áreas asociadas con la detección sin contacto de objetos en el espacio.A pesar del constante desarrollo de la tecnología, este tipo de dispositivo no abandonará el mercado de los dispositivos de medición en un futuro previsible, ya que su funcionamiento se basa en las leyes fundamentales de la física.
Artículos similares: