La ciencia en el campo de la electricidad en los siglos XIX y XX se desarrolló rápidamente, lo que condujo a la creación de motores eléctricos de inducción. Con la ayuda de tales dispositivos, el desarrollo de la industria industrial ha avanzado mucho y ahora es imposible imaginar plantas y fábricas sin máquinas eléctricas que utilicen motores eléctricos asíncronos.
Contenido
Historia de la apariencia
La historia de la creación de un motor eléctrico asíncrono comienza en 1888, cuando Nikola Tesla patentó un circuito de motor eléctrico, en el mismo año otro científico en el campo de la ingeniería eléctrica galileo ferraris publicó un artículo sobre los aspectos teóricos del funcionamiento de una máquina asíncrona.
En 1889 el físico ruso Mikhail Osipovich Dolivo-Dobrovolsky recibió una patente en Alemania para un motor eléctrico trifásico asíncrono.

Todos estos inventos permitieron mejorar las máquinas eléctricas y condujeron al uso masivo de máquinas eléctricas en la industria, lo que aceleró significativamente todos los procesos tecnológicos en la producción, aumentó la eficiencia del trabajo y redujo su intensidad laboral.
Actualmente, el motor eléctrico más común utilizado en la industria es el prototipo de una máquina eléctrica creada por Dolivo-Dobrovolsky.
El dispositivo y el principio de funcionamiento de un motor asíncrono.
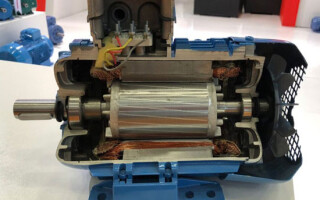
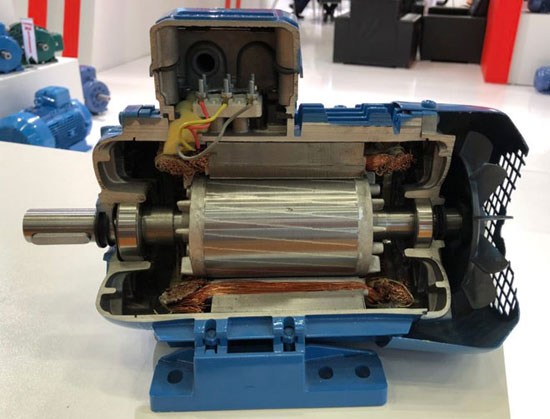
Los componentes principales de un motor de inducción son el estator y el rotor, que están separados entre sí por un espacio de aire. El trabajo activo en el motor lo realizan los devanados y el núcleo del rotor.
La asincronía del motor se entiende como la diferencia entre la velocidad del rotor y la frecuencia de rotación del campo electromagnético.
estator - esta es una parte fija del motor, cuyo núcleo está hecho de acero eléctrico y montado en el marco. La cama está hecha de forma fundida de un material que no es magnético (hierro fundido, aluminio). Los devanados del estator son un sistema trifásico en el que los cables se colocan en ranuras con un ángulo de desviación de 120 grados. Las fases de los devanados están conectadas de forma estándar a la red de acuerdo con los esquemas de "estrella" o "triángulo".

Rotor Es la parte móvil del motor. Los rotores de los motores eléctricos asíncronos son de dos tipos: con jaula de ardilla y rotores de fase. Estos tipos difieren entre sí en los diseños del devanado del rotor.
Motor asíncrono de jaula de ardilla
Este tipo de máquina eléctrica fue patentado por primera vez por M.O. Dolivo-Dobrovolsky y se llama popularmente "rueda de ardilla" debido a la apariencia de la estructura. El devanado del rotor cortocircuitado consta de varillas de cobre cortocircuitadas con anillos (aluminio, latón) e insertado en las ranuras del devanado del núcleo del rotor. Este tipo de rotor no tiene contactos móviles, por lo que estos motores son muy fiables y duraderos en funcionamiento.
Motor de inducción con rotor de fase
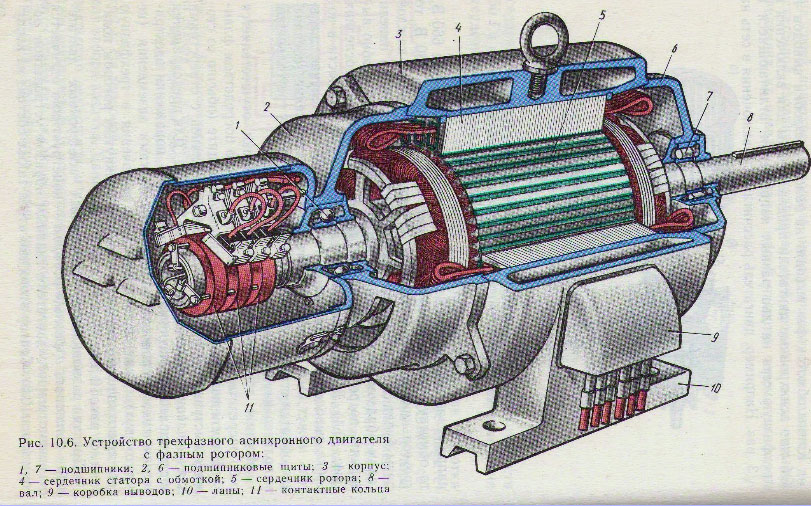
Tal dispositivo le permite ajustar la velocidad del trabajo en un amplio rango. El rotor de fase es un devanado trifásico, que está conectado de acuerdo con los esquemas de "estrella" o triángulo. En tales motores eléctricos, hay cepillos especiales en el diseño, con los que puede ajustar la velocidad del rotor. Si se agrega un reóstato especial al mecanismo de dicho motor, cuando se enciende el motor, la resistencia activa disminuirá y, por lo tanto, las corrientes de arranque disminuirán, lo que afectará negativamente a la red eléctrica y al dispositivo en sí.
Principio de operación
Cuando se aplica una corriente eléctrica a los devanados del estator, se produce un flujo magnético. Dado que las fases se desplazan entre sí en 120 grados, debido a esto, el flujo en los devanados gira. Si el rotor está en cortocircuito, entonces, con tal rotación, aparece una corriente en el rotor, lo que crea un campo electromagnético. Al interactuar entre sí, los campos magnéticos del rotor y el estator hacen que el rotor del motor eléctrico gire. Si el rotor está en fase, entonces se aplica voltaje al estator y al rotor simultáneamente, aparece un campo magnético en cada mecanismo, interactúan entre sí y giran el rotor.
Ventajas de los motores asíncronos
| con rotor en jaula de ardilla | Con rotor de fase |
|---|---|
| 1. Dispositivo simple y circuito de lanzamiento. | 1. Pequeña corriente de arranque |
| 2. Bajo costo de fabricación | 2. Posibilidad de ajustar la velocidad de rotación |
| 3. Al aumentar la carga, la velocidad del eje no cambia | 3. Trabaja con pequeñas sobrecargas sin cambiar la velocidad |
| 4. Capaz de soportar sobrecargas a corto plazo | 4. Se puede aplicar el inicio automático |
| 5. Funcionamiento fiable y duradero. | 5. Tiene un gran par |
| 6. Apto para todas las condiciones de trabajo | |
| 7. Tiene una alta eficiencia |
Desventajas de los motores asíncronos
| con rotor en jaula de ardilla | Con rotor de fase |
|---|---|
| 1. La velocidad del rotor no es ajustable | 1. Grandes dimensiones |
| 2. Par de arranque pequeño | 2. La eficiencia es menor |
| 3. Alta corriente de arranque | 3. Mantenimiento frecuente debido al desgaste de las escobillas |
| 4. Cierta complejidad de diseño y la presencia de contactos móviles. |
Los motores asíncronos son dispositivos muy eficientes y con excelentes características mecánicas, lo que los convierte en líderes en frecuencia de uso.
Modos de funcionamiento

Un motor eléctrico de tipo asíncrono es un mecanismo universal y tiene varios modos durante la duración de la operación:
- Continuo;
- término corto;
- Periódico;
- Repetido a corto plazo;
- Especial.
modo continuo - el modo principal de operación de los dispositivos asíncronos, que se caracteriza por el funcionamiento constante del motor eléctrico sin paradas con una carga constante. Este modo de operación es el más común, utilizado en empresas industriales en todas partes.
modo momentáneo - trabaja hasta que se alcanza una carga constante durante un tiempo determinado (10 a 90 minutos), no tener tiempo para calentar tanto como sea posible. Después de eso se apaga. Este modo se utiliza cuando se suministran sustancias de trabajo (agua, petróleo, gas) y otras situaciones.
Modo periódico - la duración del trabajo tiene un cierto valor y se apaga al final del ciclo de trabajo. Modo de funcionamiento start-work-stop. Al mismo tiempo, puede apagarse por un tiempo durante el cual no tiene tiempo de enfriarse a temperaturas externas y volver a encenderse.
modo intermitente - el motor no se calienta al máximo, pero tampoco tiene tiempo de enfriarse a la temperatura exterior. Se utiliza en ascensores, escaleras mecánicas y otros dispositivos.
régimen especial - la duración y el período de inclusión son arbitrarios.
En ingeniería eléctrica, existe un principio de reversibilidad de las máquinas eléctricas, lo que significa que el dispositivo puede convertir la energía eléctrica en energía mecánica y realizar las acciones opuestas.
Los motores eléctricos asíncronos también corresponden a este principio y tienen un modo de funcionamiento de motor y generador.
modo motor - el modo principal de funcionamiento de un motor eléctrico asíncrono. Cuando se aplica voltaje a los devanados, surge un par electromagnético, arrastrando el rotor con el eje, y así el eje comienza a girar, el motor alcanza una velocidad constante, realizando un trabajo útil.
modo generador - basado en el principio de excitación de corriente eléctrica en los devanados del motor durante la rotación del rotor. Si el rotor del motor gira mecánicamente, se forma una fuerza electromotriz en los devanados del estator, en presencia de un condensador en los devanados, se produce una corriente capacitiva.Si la capacitancia del capacitor es de cierto valor, dependiendo de las características del motor, entonces el generador se autoexcitará y aparecerá un sistema de voltaje trifásico. Así, el motor de jaula de ardilla funcionará como un generador.
Control de velocidad de motores asíncronos
Para regular la velocidad de rotación de los motores eléctricos asíncronos y controlar sus modos de funcionamiento, existen los siguientes métodos:
- Frecuencia: cuando cambia la frecuencia de la corriente en la red eléctrica, cambia la frecuencia de rotación del motor eléctrico. Para este método, se utiliza un dispositivo llamado convertidor de frecuencia;
- Reostático: cuando cambia la resistencia del reóstato en el rotor, cambia la velocidad de rotación. Este método aumenta el par de arranque y el deslizamiento crítico;
- Pulso: un método de control en el que se aplica un tipo especial de voltaje al motor.
- Cambiar los devanados durante el funcionamiento del motor eléctrico del circuito "estrella" al circuito "triángulo", lo que reduce las corrientes de arranque;
- Control de cambio de par de polos para rotores de jaula de ardilla;
- Conexión de reactancia inductiva para motores con rotor bobinado.
Con el desarrollo de los sistemas electrónicos, el control de varios motores eléctricos de tipo asíncrono se está volviendo más eficiente y preciso. Dichos motores se utilizan en todo el mundo, la variedad de tareas realizadas por dichos mecanismos crece cada día y la necesidad de ellos no disminuye.
Artículos similares: